Title: The metallicity dependence and evolutionary times of merging binary black holes: Combined constraints from individual gravitational-wave detections and the stochastic background
Authors: Kevin Turbang, Max Lalleman, Thomas A. Callister, Nick van Remortel
First Author’s Institution: Theoretische Natuurkunde, Vrije Universiteit Brussel, Pleinlaan 2, B-1050 Brussels, Belgium
Status: Currently only pre-print available
The Gravitational Wave Ocean
Before the final few seconds of a gravitational wave merger signal washes up on LIGO–Virgo–KAGRA detectors on Earth, the black holes or neutron stars that caused the powerful waves were actually orbiting around each other for much, much longer – possibly for hundreds of millions of years. The gravitational waves emitted prior to the pair’s final hurrah are too quiet to be picked up via ground-based interferometry by the current detectors, instead they awash together in a background hum like waves out at sea.
The length of time between two black holes forming and their eventual merging – otherwise known as delay time – is a useful signature for telling us where the black holes came from and the lives of the stars from which they were born. Fortunately, we don’t have to sit around for a billion years watching the cosmos play at spinning black holes around each other (though it would be fun to help if you were an interstellar cat). The distribution of time delays can be calculated using the number of merging black holes per given time at a certain redshift (called the merger rate), something that we can measure with current detections of merging black holes with ground-based detectors; as long as we know the rate of stellar formation, and how this varies with the metallicity of the forming stars.
Instead of waiting for one binary system to merge somewhere in the cosmos, we can understand the time delay distribution by detecting many black holes which have formed and merged at different points in time. The different information that multiple detections give us allows us to paint a picture of this time delay distribution without waiting the lifetime of a black hole binary. There’s one crux however: with the limited sensitivity of current ground based gravitational wave detectors, we only really resolve merging black holes out to a redshift of around 1, about 8 billion years ago, and when the universe had already started slowing its pace of forming stars. The black holes merging closer than this distance make loud enough gravitational waves that stand out from the noise, making them resolvable, while beyond this distance gravitational waves that are quieter and harder to detect, lost in detector noise, hence are unresolved. This means we can only understand the merger rate at small redshifts with resolved detections, while minimising the information we can get about the time delay distribution.
Heading for Choppy Waters
Fortunately, today’s authors have a trick up their sleeve. By combining the information from the current detections loud enough to individually identify and the information from the background hum of merging black holes too weak to detect, the so-called stochastic background, they can help bypass this problem. The stochastic background is made up of unresolved signals from many more inspiralling black holes – a random sea of gravitational waves – and provides vastly more information about the black hole population at higher redshifts. The authors show that using information about the stochastic background, we can extract information about the shape of the time delay distribution (i.e., whether most black holes take a long time to merge or whether most merge relatively quickly after forming), the minimum time a black hole binary takes to merge, and the maximum metallicity environment that can create merging black holes. However, this background has so far been too quiet to detect. Today’s authors show that predicting these parameters using only resolved signals doesn’t tell us much about the time delay distribution, but they change significantly when including different models of the stochastic background.
Even though we haven’t detected this stochastic background, we can still make predictions about the time delay distribution, because we know that the stochastic signal needs to be quieter than we can currently hear in the detectors. Therefore there should be fewer merging binaries making up the background, making it not loud enough to meet the detection threshold. This means we have an estimate of the energy per unit frequency of the stochastic background, without having even detected it.
The author’s model assumes the time delay probability distribution is a power law with slope kappa. A steeply positively sloped time delay distribution would mean that there is very little probability of any objects merging quickly after they have formed and it’s very likely that black holes take a long time to merge, while a steeply negative slope would mean that it’s very likely that black holes merge quickly after forming. Using the resolved detections and this stochastic background estimate, the author’s find kappa is strongly constrained to be negative. Whether the slope would be positive or negative is determined by the low redshift black hole population – a positive slope would mean that since every greater time delay is more probable than the smaller time delay before, every day there would be more and more black holes merging. Fortunately we don’t need to explain an ever increasing number of merging black holes, as measurements at low redshifts show that there are fewer merging black holes closer to us as far as our resolved detections reach. Meanwhile, they can’t place any constraints on the minimum delay time or the maximum sensitivity. This is a consequence of the estimated stochastic background being much weaker than what we can detect with the current observations.
Our Next Great Voyages
With the next big set of improvements to the LIGO detectors currently being worked on and implemented comes two possibilities: either this stochastic background is detected, or it remains too quiet to be picked up. The authors show that either of these cases will be more informative about the time delay distribution than what the current observations can say. By simulating a stochastic background for each of these future cases and adding it to the current resolved detections, they can say more about the astrophysics of the time delay and metallicities of the black hole mergers in the universe.
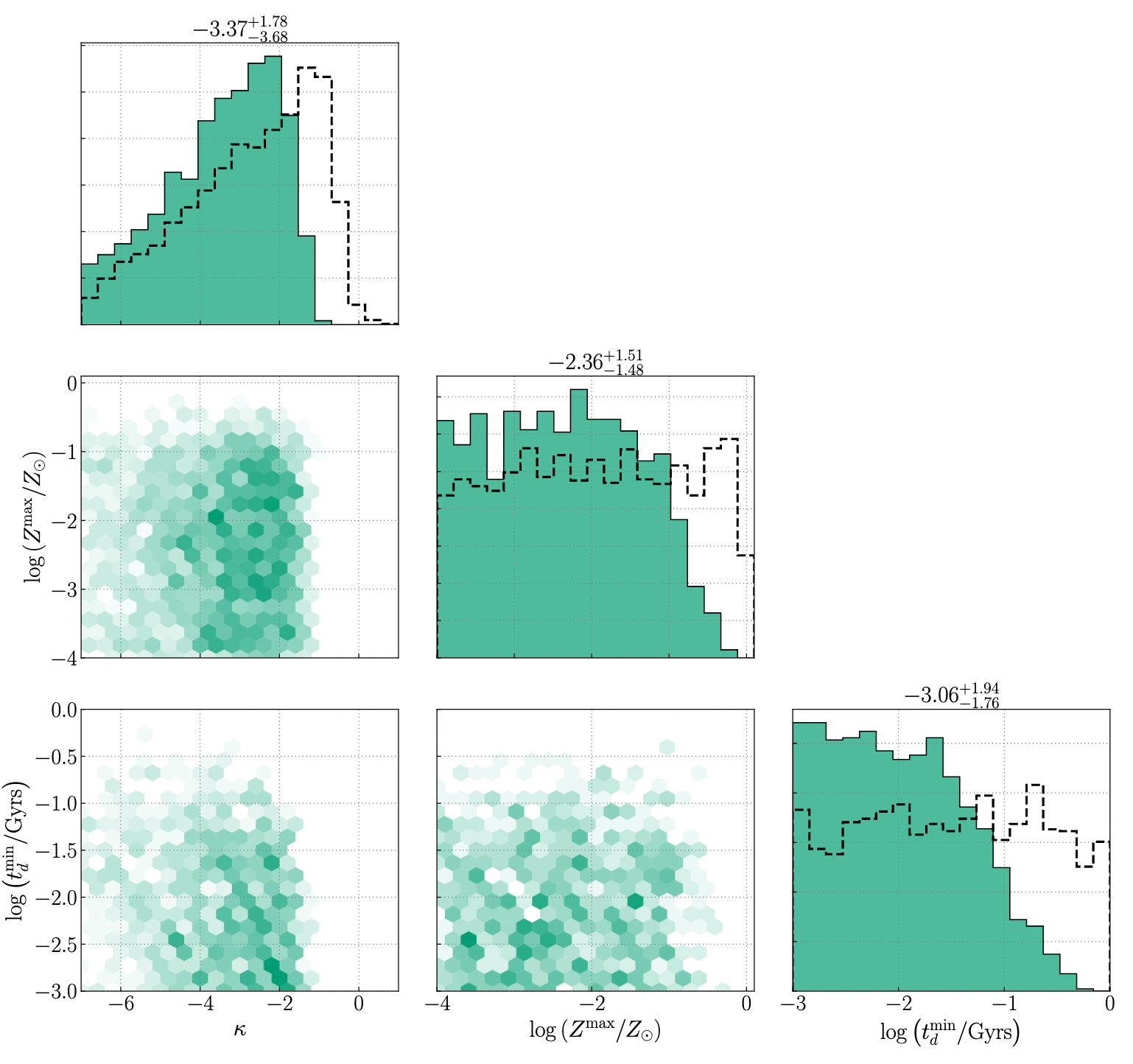
For the case of a future detection of the stochastic background, the slope of the time delay distribution is likely to be highly negative, while the metallicity parameter and the minimum time delay are both constrained to smaller values, as seen in Figure 1. This means that a universe with a loud stochastic background has shorter delay times with lots of black holes merging in the early universe, and at low metallicities.
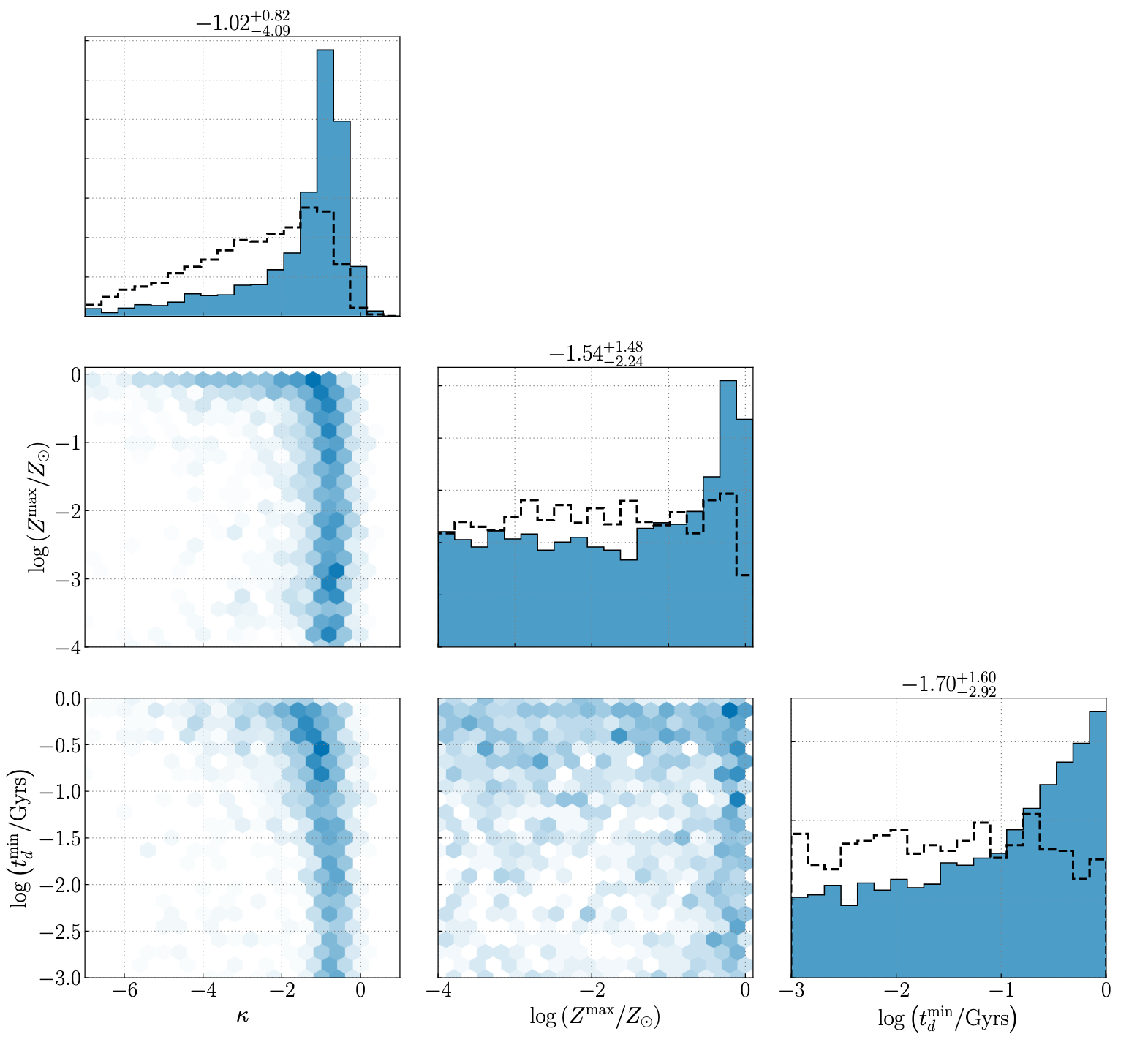
On the other hand, a non-detection at higher sensitivities means that the time delay slope is more likely to be weakly negative, with larger values of maximum metallicity and and minimum time delay. In this case, there are fewer probable values of the time delay power law slope (we can understand this as the probability distribution of kappa in Figure 2 is narrower, meaning a smaller uncertainty on this value), while there is a larger uncertainty on the maximum metallicity and minimum time delay parameters. Essentially, this result is because a shallower slope of the time delay (a more even distribution of delay times across cosmic time) is the only way to get a stochastic background that is too quiet to be detected with future sensitivities. A quiet background means that there are fewer further away black holes merging to contribute to the background, and so there can’t have been many more black holes merging at the start of the universe as there are now.
So how do we tell how long it takes for two black holes in the universe to merge? No matter if we see it or not, the stochastic background will give us more information when the next sets of gravitational wave observations are gathered. With the currently undergoing fourth observing run of the LIGO-Virgo-KAGRA detectors, hopefully it won’t be long before we can sail the stochastic seas, so get to your seats for the great black hole race of the universe!
Astrobite edited by Evan Lewis
Featured image credit: Adapted from Ricky Esquivel and Nieroshots photography