Title: Accelerating Giant Impact Simulations with Machine Learning
Authors: Caleb Lammers, Miles Cranmer, Sam Hadden, Shirley Ho, Norman Murray, Daniel Tamayo
First Author’s Institution: Department of Astrophysical Sciences, Princeton University, Princeton, NJ, USA
Status: Submitted to the Astrophysical Journal [open access]
Planet Formation
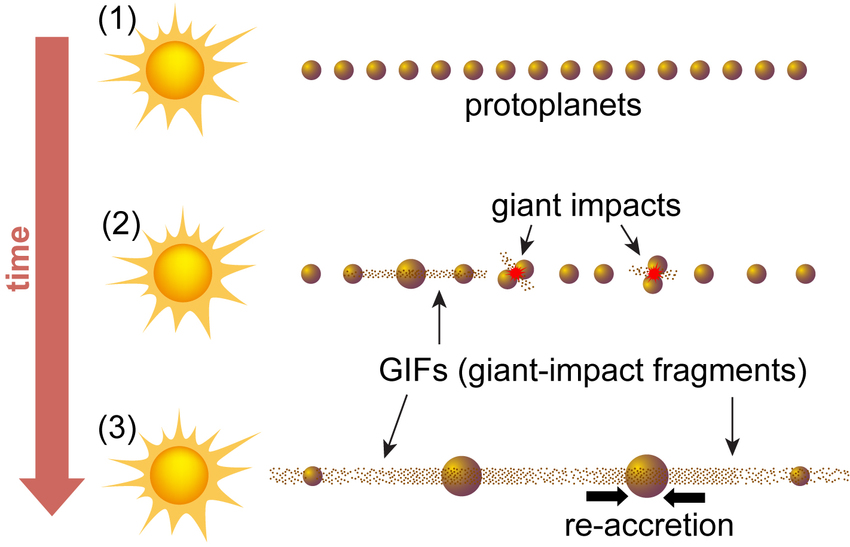
In the nebular hypothesis view of planet formation, planets form out of a protoplanetary disk, starting out as small dust grains, some of which combine and grow to form planetesimals and eventually planets. Part of this process is the giant impact phase, in which the planetesimals experience frequent, violent collisions, leading to the growth of what will eventually become fully fledged planets, as shown in Figure 1.
Numerically modeling the giant impact phase is complicated by the computational difficulty of running simulations of many bodies over long timescales. Machine learning (ML) has already been adopted to improve and speed up planetary simulations, such as with the Stability of Planetary Orbital Configurations Klassifier (SPOCK) package. SPOCK’s first incarnation (SPOCKI) predicts whether a compact planetary system is stable over 1,000,000,000 orbits based on the results of a shorter 10,000 orbit integration, and an extension (SPOCKII) uses those results to predict when a planetary system will destabilize.
Creating a Machine Learning™ Framework
Today’s paper extends previous work by using ML to predict the outcomes of planet-planet collisions in three-planet systems with two subtasks: 1) predicting which planet pair will collide and 2) predicting the orbital configuration of the resulting system. The authors use supervised learning: giving a model a training set with inputs and correct outputs so that the model can learn the mapping from inputs to outputs. Predicting collisions (subtask 1) requires classification, producing an outcome from a set of discrete options or categories, in this case, which planets collide. Predicting resulting orbital configurations (subtask 2) requires regression, producing numerical values describing the orbit of the post-collision system. The authors use a training set of over 500,000 N-body simulations integrated with the REBOUND package. They initialize tightly packed three-planet systems with randomized initial conditions and integrate the systems for ten million orbits (of the innermost planet) with mass and momentum conservation. The authors only keep the systems with mergers between 10,000 and 10,000,000 orbits so the ML framework does not concern itself with non-merging systems.
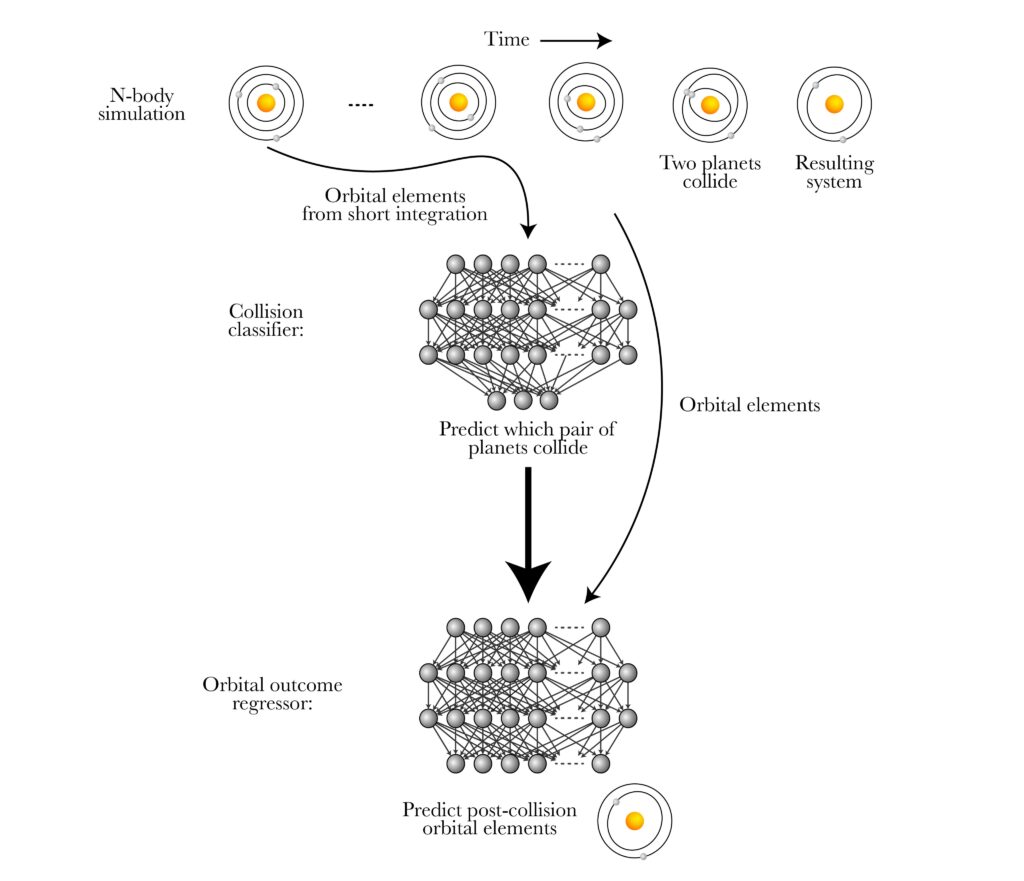
The authors use separate multi-layer perceptron (MLP) models independently trained on 80% of the training set (leaving the rest as a validation set) to complete both subtasks, following the schematic shown in Figure 2. The collision classifier uses as inputs the orbital elements of the three planets after they’ve completed 10,000 orbits, generates the probabilities of planet pair collisions, and samples the probabilities to determine which pair of planets collide. The orbital outcome regressor takes the orbital elements of the three planets and the choice of which planets collide to predict the new orbital elements (semi-major axis, eccentricity, and inclination) of the resulting system.
Piecing Together the Giant Impact Emulator
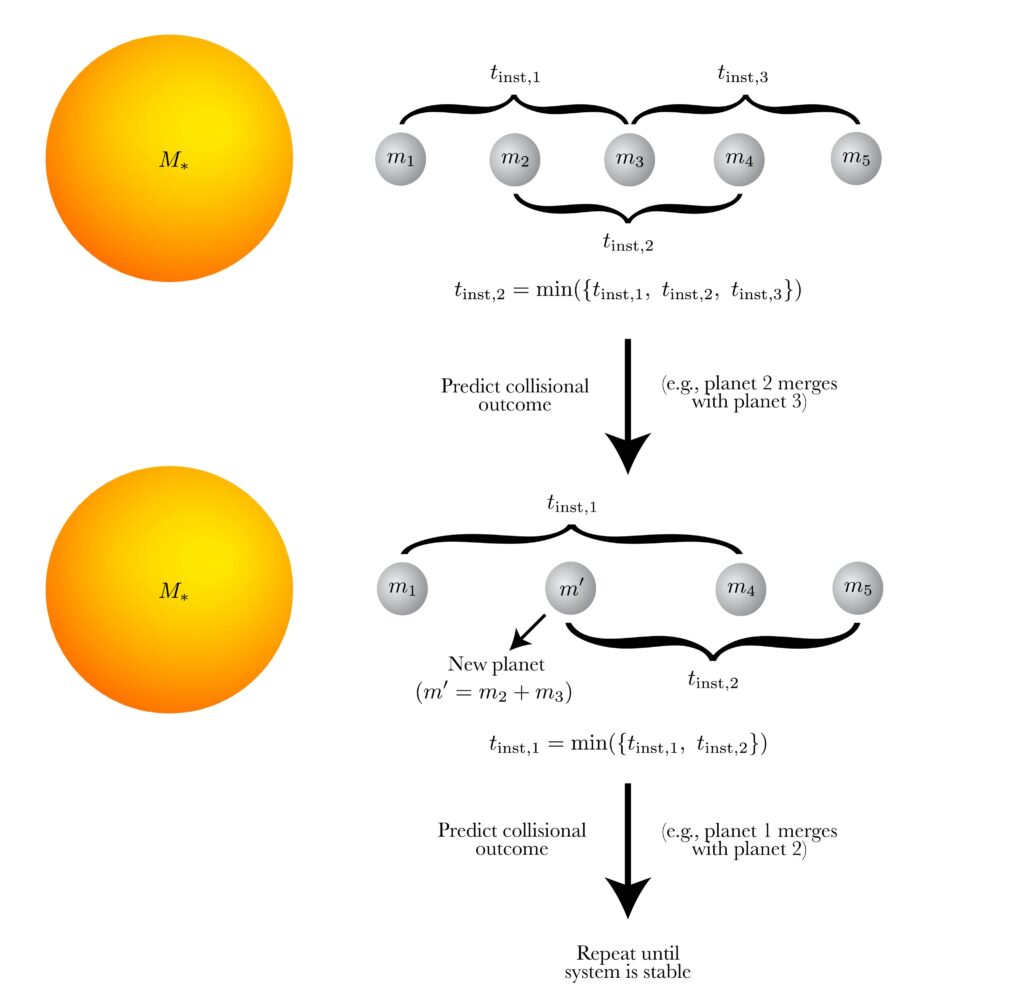
The authors combine their ML model with SPOCKII to create an iterative emulator to model the giant impact phase, with a schematic shown in Figure 3. The emulator takes in overly packed, multi-planet systems with randomly initialized configurations, groups the systems into trios of planets, uses SPOCKII to predict when the systems will destabilize, merges the most unstable trio, and then repeats until stability is achieved. The authors also run N-body simulations for 500 ten-planet systems for comparison with the results of the emulator. As shown in Figure 4, there is close agreement with masses, spacings, inclinations, and most system-level properties.
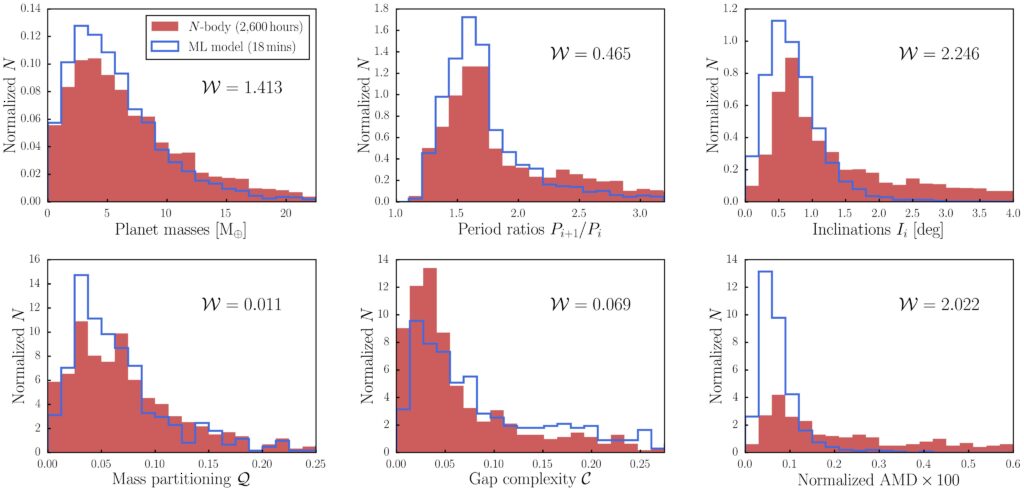
In comparison with the N-body simulations, the ML-based emulator is ~10,000x faster. The collision classifier model predicts probabilities with a scatter of ~10% and minimal offsets from the N-body-derived probabilities. The orbital outcome regressor predicts orbital configurations for the validation set almost at the accuracy limit set by chaos inherent in N-body dynamics.
Planet formation is a messy, unsolved problem. Until the discovery of exoplanetary systems, we had only the Solar System and its single formation outcome to study. It turns out that nature produces a beautiful mosaic of planetary systems, many of which bear little resemblance to our own. The giant impact phase has long been a bottleneck in simulating planet formation due to computational constraints, and today’s paper presents a truly exciting advancement in modeling planet-planet collisions. The model is limited in that it breaks multi-planet systems into trios of adjacent planets and models collisions and scattering only within trios, though the authors expect this is a minor effect. The model is publicly available and will certainly expand the frontier of possible planet formation analyses.
Astrobite edited by Nathalie Korhonen
Featured image credit: NASA/JPL-Caltech